 English
English 简体中文
简体中文  Esperanto
Esperanto  Afrikaans
Afrikaans  Català
Català  שפה עברית
שפה עברית  Cymraeg
Cymraeg  Galego
Galego  繁体中文
繁体中文  Latviešu
Latviešu  icelandic
icelandic  ייִדיש
ייִדיש  беларускі
беларускі  Hrvatski
Hrvatski  Kreyòl ayisyen
Kreyòl ayisyen  Shqiptar
Shqiptar  Malti
Malti  lugha ya Kiswahili
lugha ya Kiswahili  አማርኛ
አማርኛ  Bosanski
Bosanski  Frysk
Frysk  ភាសាខ្មែរ
ភាសាខ្មែរ  ქართული
ქართული  ગુજરાતી
ગુજરાતી  Hausa
Hausa  Кыргыз тили
Кыргыз тили  ಕನ್ನಡ
ಕನ್ನಡ  Corsa
Corsa  Kurdî
Kurdî  മലയാളം
മലയാളം  Maori
Maori  Монгол хэл
Монгол хэл  Hmong
Hmong  IsiXhosa
IsiXhosa  Zulu
Zulu  Punjabi
Punjabi  پښتو
پښتو  Chichewa
Chichewa  Samoa
Samoa  Sesotho
Sesotho  සිංහල
සිංහල  Gàidhlig
Gàidhlig  Cebuano
Cebuano  Somali
Somali  Тоҷикӣ
Тоҷикӣ  O'zbek
O'zbek  Hawaiian
Hawaiian  سنڌي
سنڌي  Shinra
Shinra  Հայերեն
Հայերեն  Igbo
Igbo  Sundanese
Sundanese  Lëtzebuergesch
Lëtzebuergesch  Malagasy
Malagasy  Yoruba
Yoruba  Español
Español  Português
Português  русский
русский  Français
Français  日本語
日本語  Deutsch
Deutsch  tiếng Việt
tiếng Việt  Italiano
Italiano  Nederlands
Nederlands  ภาษาไทย
ภาษาไทย  Polski
Polski  한국어
한국어  Svenska
Svenska  magyar
magyar  Malay
Malay  বাংলা ভাষার
বাংলা ভাষার  Dansk
Dansk  Suomi
Suomi  हिन्दी
हिन्दी  Pilipino
Pilipino  Türkçe
Türkçe  Gaeilge
Gaeilge  العربية
العربية  Indonesia
Indonesia  Norsk
Norsk  تمل
تمل  český
český  ελληνικά
ελληνικά  український
український  Javanese
Javanese  فارسی
فارسی  தமிழ்
தமிழ்  తెలుగు
తెలుగు  नेपाली
नेपाली  Burmese
Burmese  български
български  ລາວ
ລາວ  Latine
Latine  Қазақша
Қазақша  Euskal
Euskal  Azərbaycan
Azərbaycan  Slovenský jazyk
Slovenský jazyk  Македонски
Македонски  Lietuvos
Lietuvos  Eesti Keel
Eesti Keel  Română
Română  Slovenski
Slovenski  मराठी
मराठी  Srpski језик
Srpski језик


Дарди 4WD-и 4WD-ро ҷудо кунед
Вазорати амнияти ҷамъиятӣ ошкор кард, ки парки мошинҳои барқии Чин (EV) аз 24 миллион нафар гузаштааст, ки 7,18% шумораи умумии аҳолии автомобилро ташкил медиҳад. Ин афзоиши назаррас дар моликияти EV боиси таҳаввулоти босуръат дар бахши санҷиш ва нигоҳдории EV гардид. Ҳамчун як провайдери пешқадами ҳалли ҳамаҷонибаи саноати бозрасии автомобилҳо, Anche таҷрибаи ғанӣ ва тавоноии технологии худро барои мустақилона таҳияи динамометрҳои 4WD истифода бурда, ба марказҳои санҷишӣ барои ноил шудан ба рушди гуногуни тиҷорат қувват мебахшад.

Қисми 1 - Шарҳи таҷҳизот
Дирамка 4WD
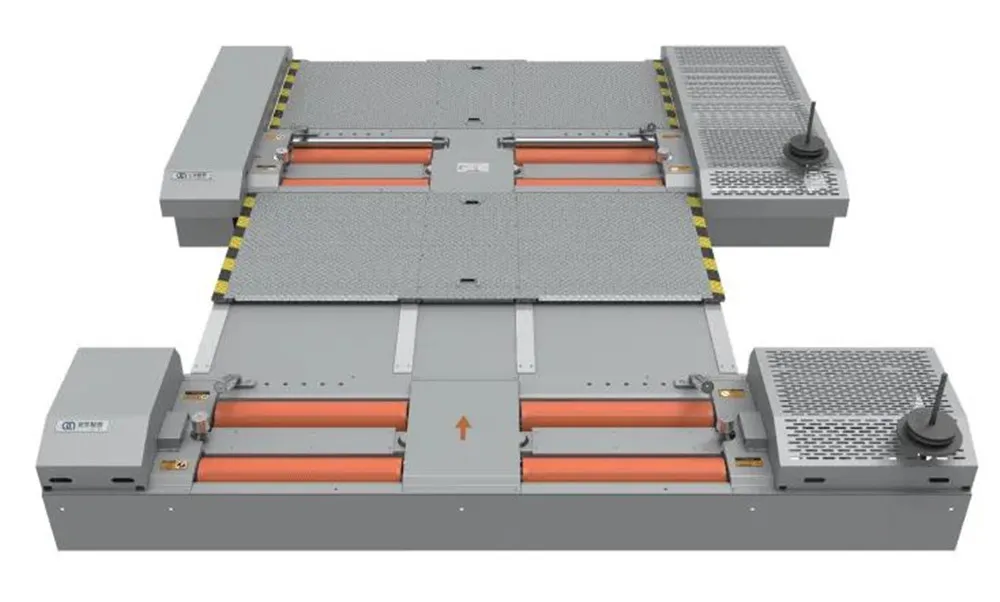
Дарди 4WD-и 4WD-ро, махсусан санҷиш барои бехатарии бехатарӣ тибқи стандартҳои "Кодекси истифодаи мошинҳои нави воситаҳои нақлиёт" ва усулҳои андозагирии партовҳо дар доираи суръатбахшии ройгон Давра. " Ин таҷҳизоти пешрафта қодир аст, ки ба нерӯи ронандагӣ, қобилияти босуръат ва самаранокии истеъмоли истеъмолии воситаҳои нақлиёти барқӣ арзёбӣ кунад.
Қисми 2 Нишонаҳои функсионалӣ
1. Пойгоҳи чархи танзимшаванда
Динамометр дорои хусусияти автоматикунонидашудаи танзими пойгоҳи чарх мебошад, ки дар асоси маълумоти автомобил, ки дар базаи он нигоҳ дошта мешавад.
2. Насби самаранок
Бо фитнинги сими авиатсионӣ барои интерфейси пайвасти сигнал, динампометрҳо ва эътимоднокӣ ва гузаронидани босуръатро таъмин мекунад.
3. Иҷрои беҳтар
Динамометр бо як мошини пуриқтидори ҷараён, ки бо ҳаво хунук карда шудааст, иҷрои аълои боркуниро таъмин мекунад.
4. Нигоҳдории қулай
Ҳам сахтафзор ва ҳам нармафзори динамометр тарҳи модулиро дар бар мегиранд, ки насб, такмил ва нигоҳдории осонро осон мекунанд.
5. Синхронизатсияи дугонаи пеши-қафо
Динамометр механизми синхронизатсияи дугонаро истифода мебарад, ки назорати механикӣ ва системаро барои кори бефосила муттаҳид мекунад.
6. Ҳифзи бехатарӣ
Бо дастгоҳҳои бехатарӣ муҷаҳҳаз шудааст, ба монанди маҳдудияти автоматӣ ва қулфи худкор, динампометр бехатарии операторро медиҳад.
7. Таъсири мутақобилаи инсон ва компютер
Интерфейси интерфейси дӯстона, тақсими менюи корбарӣ ва коркарди маълумот Намоиши намоиши одатҳои маъмул ва истифодабарии таҷрибаи корбар, беҳтар кардани таҷрибаи корбарон.
8. Ҳимояи барзиёд
Системаи назорат бо муҳофизати сершумори бехатарӣ ва механизмҳои ҳушдордиҳии автоматӣ, аз ҷумла муҳофизати изофабор, муҳофизати аз ҳад зиёд, муҳофизати ноқилҳои кӯтоҳ, муҳофизати пастшиддат, муҳофизати талафоти фазавӣ ва муҳофизати ихроҷ тарҳрезӣ шудааст.
9. Муқовимат ба фарсудашавӣ
Сатҳи ғилдирак бо технологияи пошидани хӯлаи пошидан/кнурлинг коркард карда мешавад, ки дар натиҷа коэффисиенти баланди часпидан ва муқовимати истисноии фарсудашавӣ ба вуҷуд меояд.
Банди 3


То ба имрӯз, динаметрҳои 4WD-и худро лағжиш намоед, ки дар марказҳои тестӣ аллакай насб шудааст, ки дар шаҳрҳо дар шаҳрҳо ба монанди Шенхай ва Триан сохта шудааст. Дар ояндаи наздик Дилинометрҳо дар шаҳрҳои дигар ба марказиализатсия кардани марказҳои тестӣ дар таҳкурсӣ дар таҳкурсӣ дар таҳкурсии бозорҳои интенсив ва баланд бардоштани рақобатпазирии онҳо пешниҳод карда мешаванд. Ғайр аз он, лағжонидани динаметтератсияи пешинаи худ ба бозори байналмилалӣ ба зудӣ мусоидат мекунад, ки ба талошҳои ҷаҳонии энергия ва коҳиши партовҳо мусоидат мекунанд.
Ирсоли дархост

X
Мо кукиҳоро барои пешниҳод кардани таҷрибаи беҳтари дидан, таҳлили трафики сайт ва фардӣ кардани мундариҷа истифода мебарем. Бо истифода аз ин сайт, шумо ба истифодаи мо аз кукиҳо розӣ мешавед.
Сиёсати Корбурди Маълумоти Шахсӣ